Manual Rev.: 1.0
Revision Date: September 30, 2020
Part Number: 50-1Z322-1000
Preface
Copyright
Copyright © 2020 ADLINK Technology, Inc. This document contains proprietary information protected by copyright. All rights are reserved. No part of this manual may be reproduced by any mechanical, electronic, or other means in any form without prior written permission of the manufacturer.
Disclaimer
The information in this document is subject to change without prior notice in order to improve reliability, design, and function and does not represent a commitment on the part of the manufacturer. In no event will the manufacturer be liable for direct, indirect, special, incidental, or consequential damages arising out of the use or inability to use the product or documentation, even if advised of the possibility of such damages.
Trademarks
Product names mentioned herein are used for identification purposes only and may be trademarks and/or registered trademarks of their respective companies.
Revision History
| Revision | Description | Date |
|---|---|---|
| 1.0 | Initial release | 2020-09-30 |
¶ 1 Introduction
The purpose of this programming guide is to demonstrate the concepts of the GStreamer element/plugin/application program architecture in order to help users develop their own customized products with the ADLINK Edge Vision Analytics SDK. GStreamer is built on top of the GObject (for object-orientation) and Glib (for common algorithms) libraries, so some prior knowledge of these object-oriented concepts will be helpful before continuing with this guide.
This programming guide covers the following topics.
- Developing Elements/Plugins with C illustrates the architecture of the GObject-style objective oriented program to explain the overall view of the element and plugin in C. Again, so some prior knowledge of object-oriented concepts will be helpful to understanding this information.
- Developing Elements/Plugins with Python illustrates the architecture of the GObject-style objective oriented program to explain the overall view of the element and plugin in Python
- How to Use ADLINK Metadata illustrates how to retrieve and save the ADLINK defined metadata structure within the GStreamer buffer.
- Integrating the GStreamer Plugin includes examples of how to integrate code with Gstreamer to give a clearer understanding of how GStreamer is used in applications.
¶ 2 Developing Elements/Plugins with C
This section begins with a general summary of the GObject-style definition for objects with a focus on the information required to build one class and functions and concludes with an introduction to the assembly of the GStreamer constructions to help developers who do not know how to implement custom elements.
¶ 2.1 Class Declaration
In GObject, class declaration is quite different between C++, C#, JAVA, and other object-oriented programing languages. The GObject system implements its object-oriented based system on C which does not support object-orientation.
In order to use C syntax to support object-oriented semantics standardized by GObject, first describe the class metadata and then the instance data belonging to the class, as shown in the following example (see adaifiltertemplate.h and adaifiltertemplate.cpp).

The GObject system combines these two struct definitions at execution time. These two struct definitions must have a typedef declaration with the same name without an underline—this is the format commonly used by GObject in GStreamer or other libraries. The private structure is defined in _AdFilterTemplatePrivate in .cpp in case of wrapping the source code.
GObject also requires defining the parent class and instance first in each class metadata structure and instance data structure. This will let GObject know which class declarations to inherit from. In this example, _AdFilterTemplate and _ADFilterTemplateClass both inherit from the parent classes GstVideoFilter and GstVideoFilterClass, respectively.
¶ 2.1.1 Register to GObject
After defining the class content, register the class type for the GObject system.
GType ad_filter_template_get_type(void);This step allows the GObject system to identify the class by returning GType and casting the result to the right class at execution time.
¶ 2.1.2 Casting Macros
#define AD_TYPE_FILTER_TEMPLATE \
(ad_filter_template_get_type())
#define AD_FILTER_TEMPLATE(obj) \
(G_TYPE_CHECK_INSTANCE_CAST((obj), AD_TYPE_FILTER_TEMPLATE, AdFilterTemplate))
#define AD_FILTER_TEMPLATE_CLASS(klass) \
(G_TYPE_CHECK_CLASS_CAST((klass), AD_TYPE_FILTER_TEMPLATE, AdFilterTemplateClass))
#define AD_IS_FILTER_TEMPLATE(obj) \
(G_TYPE_CHECK_INSTANCE_TYPE((obj), AD_TYPE_FILTER_TEMPLATE))
#define AD_IS_FILTER_TEMPLATE_CLASS(klass) \
(G_TYPE_CHECK_CLASS_TYPE((klass), AD_TYPE_FILTER_TEMPLATE))
The above are the required macro definitions for casting the GObject and must be defined between the G_BEGIN_DECLS and G_END_DECLS tags. It is common with GObject that the inherited functions and members are called or used.
¶ 2.2 Constructors and Deconstructors
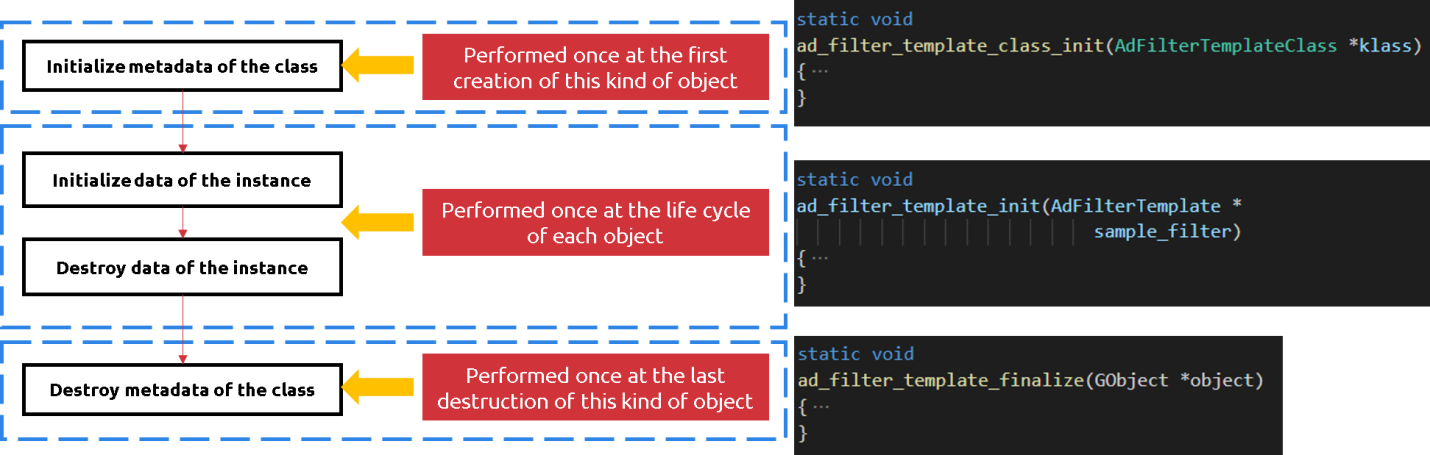
The file adaifiltertemplate.cpp implements the ad_filter_template_class_init and ad_filter_template_init constructors. When the class object memory is allocated, GInstanceInit() is called to initialize the class, then the constructors. When a class is going to be destroyed, the deconstructor will first be called. In the GObject, there is no clear connection between constructor and deconstructor. The GObject separates the deconstructor into dispose and finalize. If the class references another object, it is required to release the reference of that object in the dispose stage (refer to gst_object_unref for more details). In the finalize stage, all the allocated memory for this class is released.
¶ 2.3 Object Life Cycle
The chart below shows the life cycle of the GObject class described above. Class initialization is only performed once when the class first used in the life cycle, and each instance of the class is individually initialized and destroyed in its life cycle. Once the class is not used, it is permanently destroyed.
¶ 2.4 Class Implementation
In the GObject, you are required to cast the type to the parent and assign the implemented function to perform an override.
¶ 2.4.1 Casting in class_init
GObjectClass *gobject_class;
GstElementClass *gstelement_class;
GstVideoFilterClass *gstvideofilter_class;
gobject_class = (GObjectClass *)klass;
gstvideofilter_class = (GstVideoFilterClass *)klass;
gstelement_class = (GstElementClass *)klass;
Take ad_filter_template as an example, which has the following inheritance:

¶ 2.4.2 Override the Method of the Parent
Casting to the right parent to override the method you are going to use is the way that the GObject system runs. The class function or virtual function descriptions can be queried by the GStreamer API references.
For the GObjectClass in ad_filter_template_class_init, there are four main functions that must be implemented for the class:
- _set_property
- _get_property
- _dispose
- _finalize
parent method overriding
gobject_class->set_property = ad_filter_template_set_property;
gobject_class->get_property = ad_filter_template_get_property;
gobject_class->dispose = ad_filter_template_dispose;
gobject_class->finalize = ad_filter_template_finalize;
¶ 2.4.3 Implement Object Properties
The GObject implements a get/set mechanism for object properties. This mechanism allows the user to read through GObject's g_object_get_property or write data with g_object_set_property by knowing the name of the object property. The class supports this mechanism by registering each class property through g_object_class_install_property and overriding the _set_property and _get_property functions, For example:
get/set property install
g_object_class_install_property(gobject_class, PROP_FILTER_TYPE,
g_param_spec_int("type", "Type",
"Filter type 1.Edge 2.Gray",
0, 1, DEFAULT_FILTER_TYPE,
(GParamFlags)G_PARAM_READWRITE));
g_object_class_install_property(gobject_class, PROP_EDGE_VALUE,
g_param_spec_int("edge-value", "edge value",
"Threshold value for edge image",
0, 255, DEFAULT_EDGE_VALUE,
(GParamFlags)G_PARAM_READWRITE));
¶ 2.5 Sink and Source Pad Association
There are two kinds of pads in GStreamer: sink and source. Both of them are created by the following steps.
¶ 2.5.1 Pad Definition
Define sink or source pad factories under the GStreamer pad template. Be sure to define the name of the pad, the direction, presence, and capabilities.
static GstStaticPadTemplate sink_factory = GST_STATIC_PAD_TEMPLATE(
"sink",
GST_PAD_SINK,
GST_PAD_ALWAYS,
GST_STATIC_CAPS(GST_VIDEO_CAPS_MAKE("{ BGR }")));
static GstStaticPadTemplate src_factory = GST_STATIC_PAD_TEMPLATE(
"src",
GST_PAD_SRC,
GST_PAD_ALWAYS,
GST_STATIC_CAPS(GST_VIDEO_CAPS_MAKE("{ BGR }")));
¶ 2.5.2 Adding a Pad
Add the factories into the class_init of the GObject class. Once the class has been initialized, the GStreamer factory is created.
gst_element_class_add_pad_template(gstelement_class,
gst_static_pad_template_get(&src_factory));
gst_element_class_add_pad_template(gstelement_class,
gst_static_pad_template_get(&sink_factory));
¶ 2.6 Overriding GstVideoFilter transform_frame_ip
The ad_filter_template, inherited from GstVideoFilter, is useful for focusing on the video algorithm without additional GStreamer tasks like negotiation, capability checks, or status checks. This element is focused on processing frame data, so it is suitable to inherit the parent GstVideoFilter class. To achieve this implementation, override the virtual method transform_frame_ip.
gstvideofilter_class->transform_frame_ip = GST_DEBUG_FUNCPTR(ad_filter_template_transform_frame_ip);
In ad_filter_template_transform_frame_ip, GstVideoFilter passes the GstVideoFrame wrapper for the user to directly access the data related to the frame, unlike other GStreamer elements that pass the buffer directly. The buffer does not have to be parsed into the generic frame format.
static GstFlowReturn
ad_filter_template_transform_frame_ip(GstVideoFilter *filter, GstVideoFrame *frame)
{
AdFilterTemplate *sample_filter = AD_FILTER_TEMPLATE(filter);
GstMapInfo info;
Mat output_image;
int filter_type;
int edge_threshold;
gst_buffer_map(frame->buffer, &info, GST_MAP_READ);
ad_filter_template_initialize_images(sample_filter, frame, info);
AD_FILTER_TEMPLATE_LOCK(sample_filter);
filter_type = sample_filter->priv->filter_type;
edge_threshold = sample_filter->priv->edge_value;
AD_FILTER_TEMPLATE_UNLOCK(sample_filter);
if (filter_type == 0)
{
GST_DEBUG("Calculating edges");
Canny((*sample_filter->priv->cv_image), output_image,
edge_threshold, 255);
}
else if (filter_type == 1)
{
GST_DEBUG("Calculating black&white image");
cvtColor((*sample_filter->priv->cv_image), output_image, COLOR_BGR2GRAY);
}
if (output_image.data != NULL)
{
GST_DEBUG("Updating output image");
ad_filter_template_display_background(sample_filter, output_image);
}
gst_buffer_unmap(frame->buffer, &info);
return GST_FLOW_OK;
}
gst_buffer_map and gst_buffer_unmap deal with the mapping tasks from frame data to info. map and unmap also deal with read/write management to ensure the data is exclusively occupied. In the example, the processing option filter_type decides what the process is going to do: 1 for color to gray; 0 for Canny edge detection.
After the process is done, ad_filter_template_display_background will copy back to the frame referenced at the beginning. Then, the video frame buffer is passed downstream.
¶ 2.7 Plugin Registration
GStreamer uses a registration script to wrap elements into the plugin. The plugin is a .so file stored in the operating system accessed by GStreamer.
gboolean
ad_filter_template_plugin_init(GstPlugin *plugin)
{
return gst_element_register(plugin, PLUGIN_NAME, GST_RANK_NONE,
AD_TYPE_FILTER_TEMPLATE);
}
GST_PLUGIN_DEFINE(
GST_VERSION_MAJOR,
GST_VERSION_MINOR,
adfiltertemplate,
"ADLINK filter template plugin",
ad_filter_template_plugin_init,
PACKAGE_VERSION,
GST_LICENSE,
GST_PACKAGE_NAME,
GST_PACKAGE_ORIGIN) The plugin's information is stored in config.h included in .cpp file. Add an element register inside plugin_init, and provide the required plugin definition.
So far, we have introduced the basic concepts of the GObject structure used in C and the way to implement a basic element in GStreamer. There are other kinds of the elements described in GStreamer such as the sink element, src element, and multi-Pad element which are implemented in a similar way. Refer to the Gstreamer API reference for more information on creating custom GStreamer elements.
¶ 3 Developing Elements/Plugins with Python
Relative to programming in C, it is easier to develop elements/plugins in Python. The following uses the classifier_sample element as an example of programming elements/plugins in Python.
¶ 3.1 Import Glib Module
GStreamer is built on Glib and GObject which are compatible across platforms and programming languages. However, the following modules must still be included.
from gi.repository import Gst, GObject Developing a GStreamer application in Python requires a Gst version and initialization before using the Gst function because the GStreamer Python element loader will handle this step.
import gi
gi.require_version('Gst', '1.0')
from gi.repository import Gst, GObject
Gst.init([])
¶ 3.2 Class Declaration
Defines the class and inherits a subclass of Gst.Element.
class ClassifierSamplePy(Gst.Element):
¶ 3.3 Class Implementation
¶ 3.3.1 Initialize Class Metadata
class ClassifierSamplePy(Gst.Element):
# MODIFIED - Gstreamer plugin name
GST_PLUGIN_NAME = 'classifier_sample'
__gstmetadata__ = ("Name",
"Transform",
"Description",
"Author")
__gsttemplates__ = (Gst.PadTemplate.new("src",
Gst.PadDirection.SRC,
Gst.PadPresence.ALWAYS,
Gst.Caps.new_any()),
Gst.PadTemplate.new("sink",
Gst.PadDirection.SINK,
Gst.PadPresence.ALWAYS,
Gst.Caps.new_any()))
_sinkpadtemplate = __gsttemplates__[1]
_srcpadtemplate = __gsttemplates__[0]
# MODIFIED - Gstreamer plugin properties
__gproperties__ = {
"class-num": (int, # type
"class-num", # nick
"Class number", # blurb
1, # min
65536, # max
1001, # default
GObject.ParamFlags.READWRITE # flags
),
...
}
...
¶ 3.3.2 Initialize Class Instance
Initialize properties before base class initialization.
class ClassifierSamplePy(Gst.Element):
...
def __init__(self):
self.class_num = 1001
self.batch_num = 1
self.label = ""
self.labels = None
super(ClassifierSamplePy, self).__init__()
...
¶ 3.3.3 Sink and src Pad Association
New sink and src pads from template, including register callbacks for events, queries, or dataflow on the pads.
class ClassifierSamplePy(Gst.Element):
...
def __init__(self):
...
self.sinkpad = Gst.Pad.new_from_template(self._sinkpadtemplate, 'sink')
self.sinkpad.set_chain_function_full(self.chainfunc, None)
self.sinkpad.set_event_function_full(self.eventfunc, None)
self.add_pad(self.sinkpad)
self.srcpad = Gst.Pad.new_from_template(self._srcpadtemplate, 'src')
¶ 3.3.4 Override set and get Property Function
Override property function to implement get and set property features.
class ClassifierSamplePy(Gst.Element):
...
def __init__(self):
...
def do_get_property(self, prop: GObject.GParamSpec):
# Implement your get property
...
def do_set_property(self, prop: GObject.GParamSpec, value):
# Implement your get property
...
¶ 3.3.5 Implement Chain Function
When a sink pad pushes the buffer, then pad will call the chainfunc callback function. Implement logical frame operations in this function and push the buffer into the src pad to pass the buffer into the next element.
class ClassifierSamplePy(Gst.Element):
...
def chainfunc(self, pad: Gst.Pad, parent, buffer: Gst.Buffer) -> Gst.FlowReturn:
# Implement your frame operate logical here
...
return self.srcpad.push(buffer)
¶ 3.4 Register Python Element
You need to register the Python element after implementing the element class, and then GStreamer can scan the element.
class ClassifierSamplePy(Gst.Element):
...
GObject.type_register(ClassifierSamplePy)
__gstelementfactory__ = (ClassifierSamplePy.GST_PLUGIN_NAME,
Gst.Rank.NONE, ClassifierSamplePy)
The Python element must define the __gstelementfactory__ variable because the GStreamer Python loader will scan all Python modules in the plugin path and check whether this module defines __gstelementfactory__.
Modules that do not implement the variable can be skipped.
¶ 3.5 Install a Python Element
Usually, GStreamer scans plugins under the GST_PLUGIN_PATH environment variable. However, Python elements must be installed in the "python" folder under GST_PLUGIN_PATH. In the example below, the GST_PLUGIN_PATH is /plugins, and there is a Python element named classifier_sample.py.
plugins
├── libadedge.so
├── libadfiltertemplate.so
├── ...
├── libpylonsrc.so
└── python
├── ...
└── classifier_sample.py
¶ 4 Python Sample to Interpret Inference Result as a Yolov3 Box Detection
A deep learning inference application will infer input data with specific deep learning models. Each deep learning model will have a different inference result format. The application needs to change code to interpret inference results after changing models. This causes the inference application to have a high dependency on the deep learning model.
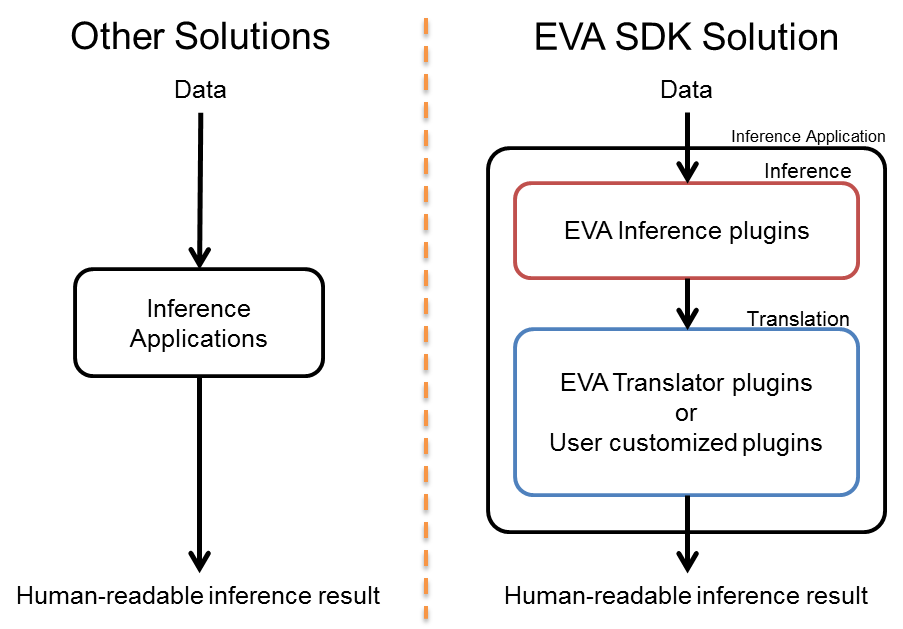
The EVA SDK separates the inference application into two parts: inference and translation. The translation part must follow the inference part. Users can easily swap between inference parts, such as OpenVINO or TensorRT, without needing to modify the translation part, or swap the translation part according to the deep learning model without needing to modify the inference part.
The EVA SDK inference plugins support most inference models, so users can focus on developing their own translation part for translating the inference results into human-readable format.
The following section includes Python sample code on how to integrate translation code with the EVA SDK inference application.
¶ 4.1 Python Sample Code
Normally, a GStreamer element will send only a single buffer with image data. However, the inference element will send a buffer list with the first index of the list being image data, and the second index being the inference data. Therefore, the translation element needs to receive the buffer list to extract both image and inference data.
...
class AdYoloPy(Gst.Element):
...
def __init__(self):
...
self.sinkpad.set_chain_function_full(self.chainfunc, None)
self.sinkpad.set_chain_list_function_full(self.chainlistfunc, None).
...
def chainlistfunc(self, pad: Gst.Pad, parent, buff_list: Gst.BufferList) -> Gst.FlowReturn:
...
YoloV3 is a special deep learning architecture having multiple output blobs with different target box sizes. The code needs to separate inference data into multiple buffers depending on the output blob size. By default, YoloV3 will have three output blobs and YoloV3-Tiny will have two output blobs. The buffer size will change according to the batch number, class number, and blob output size. The YoloV3 author’s pre-train model has 80 class numbers and the output blob’s sizes are 26x26, 52x52, and 13x13 (width x height). The following code is to calculate the size of each blob.
class AdYoloPy(Gst.Element):
...
def chainlistfunc(self, pad: Gst.Pad, parent, buff_list: Gst.BufferList) -> Gst.FlowReturn:
class_coord_dim = (self.class_num + 5) * 3
out_sizes = list(map(lambda bs: self.batch_num * class_coord_dim * bs[0] * bs[1], self.blob_size))
...
The following code will get the size of each blob, extract the second index of the buffer list and convert it to a big buffer. The EVA SDK provides an API to extract image data from a buffer list.
class AdYoloPy(Gst.Element):
...
def chainlistfunc(self, pad: Gst.Pad, parent, buff_list: Gst.BufferList) -> Gst.FlowReturn:
...
with gst_helper.get_inference_data_to_numpy(buff_list, (sum(out_sizes))) as data:
...
Next, separate the big buffer into multiple buffers and reshape each buffer to the corresponding blob dimension. The blob dimension is Batch x Class (including the coordinate information) x Blob width x Blob height.
...
with gst_helper.get_inference_data_to_numpy(buff_list, (sum(out_sizes))) as data:
offset = 0
for idx, s in enumerate(out_sizes):
blob = data[offset:offset+s].reshape(self.batch_num, class_coord_dim,
*self.blob_size[idx])
mask = self.mask[idx]
anchor = list(map(lambda m: self.anchor[m], mask))
_boxs = parse_yolo_output_blob(blob, self.input_width, self.input_height, mask, anchor, threshold=self.threshold)
boxs += _boxs
offset += s
...
After getting the blob buffer, interpret blobs as boxes. Parsing the YoloV3 format buffer is out of the scope of this document. For more details, refer to https://github.com/pjreddie/darknet/blob/f6d861736038da22c9eb0739dca84003c5a5e275/src/yolo_layer.c#L275
Below is an example of parsing code.
def parse_yolo_output_blob(blob, iw, ih, mask, anchor, threshold=0.8):
...
¶ 4.2 Draw Boxes in Image
After obtaining the boxes, the program needs to draw the boxes in image data, so it will extract the first index of the buffer list. The EVA SDK provides two APIs to get writable buffers from the buffer list and convert the buffers to NumPy like data. The data then can be used like an image in the OpenCV API.
class AdYoloPy(Gst.Element):
...
def chainlistfunc(self, pad: Gst.Pad, parent, buff_list: Gst.BufferList) -> Gst.FlowReturn:
...
buf = gst_helper._gst_get_buffer_list_writable_buffer(buff_list, 0)
img = gst_cv_helper.pad_and_buffer_to_numpy(pad, buf, ro=False)
# Draw yolo results
draw_boxs(img, boxs, self.labels)
...
Finally, release inference data and send image data to the next element.
class AdYoloPy(Gst.Element):
...
def chainlistfunc(self, pad: Gst.Pad, parent, buff_list: Gst.BufferList) -> Gst.FlowReturn:
...
buff_list.remove(1, 1)
return self.srcpad.push(buff_list.get(0))
¶ 4.3 Custom Translatation of Code
The custom translatation of code requires the following steps.
- Define your own properties. The properties of the sample code were used for the YoloV3 model. Each model has its own required information.
- Understand how to exact inference data, as YoloV3 has multiple output blobs, and divide a big buffer into multiple buffers. Models with only one output blob are easier to extract image data from.
- Implement code to interpret the blob buffer into human-readable data such as classification, detection box, or segmentation. Each model has its own output format.
- After changing the parts above, users can integrate their own translation application with the EVA inference application.
¶ 5 How to Use ADLINK Metadata
¶ 5.1 ADLINK Metadata Architecture
ADLINK provides structured metadata within the GStreamer pipeline, storing information about the frame, device, and inference results as shown below.
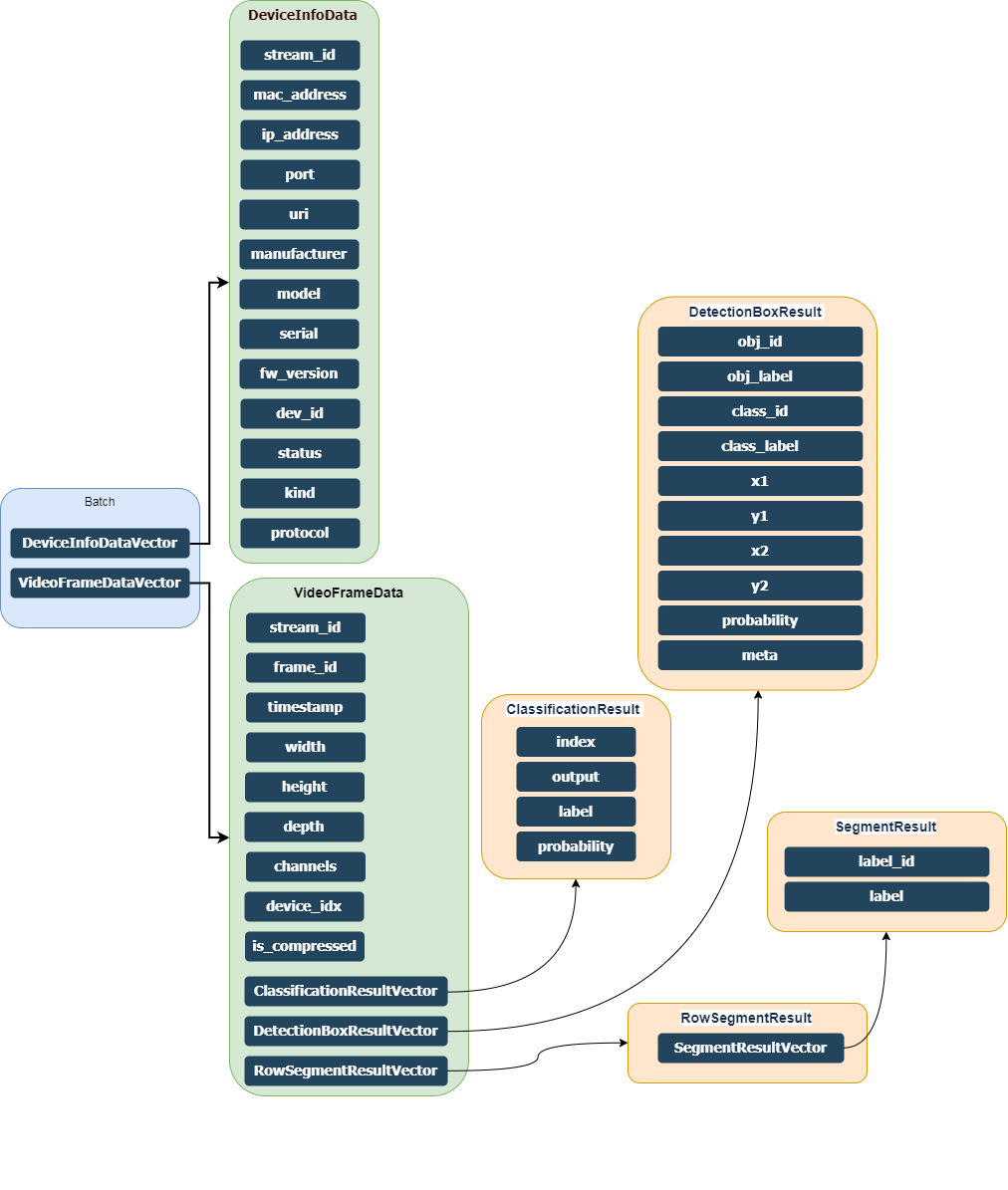
There are six different structures:
Each structure has its own items, as described in the following sections.
¶ 5.1.1 AdBatch Structure
| Field Name | Type | Description |
|---|---|---|
|
DeviceInfoDataVector |
vector |
The device information of each frame in this batch. |
|
VideoFrameDataVector |
vector |
Frames in this batch. |
¶ 5.1.2 DeviceInfoData Structure
| Field Name | Type | Description |
|---|---|---|
|
stream_id |
gchar* |
Stream publisher ID |
|
mac_address |
gchar* |
Host address |
|
ip_address |
gchar* |
Host machine IP Address |
|
port |
gint32 |
Connection port |
|
uri |
gchar* |
Video Interface URI (rtsp://xx/h264) |
|
manufacturer |
gchar* |
Vision Device manufacturer |
|
model |
gchar* |
Vision Device model |
|
serial |
gchar* |
Vision Device serial identifier |
|
fw_version |
gchar* |
Vision Device firmware version |
|
dev_id |
gchar* |
Vision Device host interface (e.g. /dev/video0 or /dev/ttyUSB0) |
|
status |
gchar* |
DeviceStatus enum (OASYS defined) |
|
kind |
gchar* |
Vision device kind enum (OASYS defined) |
|
protocol |
gchar* |
ProtocolKind enum describing how the device communicates |
¶ 5.1.3 VideoFrameData Structure
| Field Name | Type | Description |
|---|---|---|
|
stream_id |
gchar* |
Stream publisher ID |
|
frame_id |
guint32 |
Frame sample ID |
|
timestamp |
gint64 |
Time of image capture event |
|
width |
guint32 |
Frame width |
|
height |
guint32 |
Frame height |
|
depth |
guint32 |
Bit per pixel |
|
channels |
guint32 |
Channels |
|
device_idx |
guint32 |
Index of the DeviceInfoDataVec of this Batch |
|
is_compress |
gboolean |
Compression used for video frame |
|
ClassificationResultVector |
vector |
The inference result of classification |
|
DetectionBoxResultVector |
vector |
The inference result of detection boxes |
¶ 5.1.4 ClassificationResult Structure
| Field Name | Type | Description |
|---|---|---|
|
index |
gint32 |
Classification index |
|
output |
gchar* |
Output type - used when classification model has multiple types of labels for each output index |
|
label |
gchar* |
Classification label name |
|
probability |
gfloat32 |
Network confidence |
¶ 5.1.5 DetectionBoxResult Structure
| Field Name | Type | Description |
|---|---|---|
|
obj_id |
gint32 |
Detected object’s id |
|
obj_label |
gchar* |
Detected object’s proper name |
|
class_id |
gint32 |
Detected object’s classification type as raw id |
|
class_label |
gchar* |
Detected object’s classification as proper name |
|
x1 |
gfloat32 |
Top Left X Coordinate (% from 0,0). (frame base, not batch base) |
|
y1 |
gfloat32 |
Top Left Y Coordinate (% from 0,0). (frame base, not batch base) |
|
x2 |
gfloat32 |
Bottom Right X Coordinate (% from 0,0). (frame base, not batch base) |
|
y2 |
gfloat32 |
Bottom Right Y Coordinate (% from 0,0). (frame base, not batch base) |
|
probability |
gfloat32 |
Network confidence |
|
meta |
gchar* |
Buffer for extra inference metadata |
¶ 5.1.6 SegmentResult Structure
| Field Name | Type | Description |
|---|---|---|
|
label_id |
gint32 |
Label id |
|
label |
gchar* |
Label string |
|
label_id |
gint32 |
Label id |
¶ 5.2 Using ADLINK Metadata
The Gstreamer element stream provides a simple way to get ADLINK metadata with gst_buffer_get_ad_batch_meta.
GstAdBatchMeta *adbatchmeta = gst_buffer_get_ad_batch_meta(buf); GstAdBatchMeta *adbatchmeta = gst_buffer_get_ad_batch_meta(buf);
Once you get the ADLINK metadata pointer from a buffer, you can directly get/set the content of the data inside.
Set Metadata
VideoFrameData video_info;
video_info.stream_id = "from-dumper-b5d84236-a23d-49fc-a574-e0cd944490bb";
video_info.frame_id = frame_counter;
video_info.timestamp = GetDigitUTCTime();
video_info.width = 800;
video_info.height = 600;
video_info.depth = 8;
video_info.channels = 3;
video_info.device_idx = 0;
video_info.is_compress = false;
adbatchmeta->batch.frames.push_back(video_info);
Get Metadata
frame_vec_size = meta->batch.frames.size();
if(adbatchmeta->batch.frames.size() > 0)
classification_n = meta->batch.frames[0].class_results.size();
If the AdBatch metadata frame information exists, information like the frame vector size or the number of the classification results can be gotten directly.
¶ 6 Integrating the GStreamer Plugin
GStreamer includes the libgstapp plugin containing the appsink and appsrc elements to interact with the application. appsink is used to allow the application to get access to raw buffer data and appsrc is used to allow the application to feed buffers to the pipeline. Refer to GStreamer tutorials for more information on how to establish communication with appsink and appsrc.
Access to appsink and appsrc is through VideoCapture and VideoWriter from the OpenCV wrapper. We can directly provide the pipeline with appsink to VideoCapture for retrieving frames, and provide the pipeline with appsrc to send the frame into the pipeline from the application. This wrapper is much more simple for those who want to use algorithms that GStreamer does not provide, like motion extraction, video content analytics, or image saliency calculation.
Refer to the the EVA SDK installation path /samples folder for more information on Python and C++ application sample code, compiling processes described in readme.md, and for how to build the sample code.
¶ 6.1 Method 1
To grab the frame from the pipeline with appsink, the constructor provided by VideoCapture requires two signatures, the pipeline string and the API preference (enum cv::CAP_GSTREAMER). To grab the frame from the v4l2src element of the pipeline, provide the pipeline definition to VideoCapture as in the following example.
appsink
VideoCapture cap("v4l2src ! video/x-raw, format=BGR, width=640, height=480, framerate=30/1 ! appsink", CAP_GSTREAMER); The frame can then be captured via OpenCV.
VideoCapture
Mat frame;
while(true)
{
cap.read(frame);
// do your process ...
}
To send the frame to the pipeline with appsrc, the function provided by the VideoWriter requires the pipeline string, the API preference, and other parameters like fps, frame size, and color flag. The signatures are required for the pipeline caps filter settings. To send the frame data to the pipeline with appsrc, the pipeline definition must be provided to VideoWriter, as in the following example.
appsrc
cv::VideoWriter writer;
writer.open("appsrc ! videoconvert ! video/x-raw, format=BGR, width=640, height=480, framerate=30/1 ! videoconvert ! ximagesink", CAP_GSTREAMER, 0, 30, cv::Size(640, 480), true);
The target pipeline settings include, frame size (640x480), frame rate (30), and color format that fits the OpenCV default BGR color format. The pipeline then shows the frame in the xwindows via the ximagesink element. Feed the frame into the pipeline by writing it directly, as in the following example.
VideoWriter
writer.write(frame); The example code below shows the combination of the pipeline using appsink and appsrc to read a frame from the v4l2 pipeline and resizing the frame to simulate the custom algorithm process, then passing the resulting frame into the pipeline.
Combined Example
1. #include "opencv2/opencv.hpp"
2. #include <iostream>
3. #include <stdio.h>
4. #include <thread>
5. #include <chrono>
6.
7. using namespace cv;
8. using namespace std;
9. int main(int, char**)
10.{
11. Mat frame;
12.
13. VideoCapture cap("v4l2src ! video/x-raw, format=BGR, width=1024, height=768,
framerate=30/1 ! appsink", CAP_GSTREAMER);
14.
15. int deviceID = 0;
16. int apiID = cv::CAP_ANY;
17.
18. cap.open(deviceID + apiID);
19.
20. if (!cap.isOpened())
21. {
22. cerr << "ERROR! Unable to open camera\n";
23. return -1;
24. }
25.
26. cv::VideoWriter writer;
27. writer.open("appsrc ! videoconvert ! video/x-raw, format=BGR, width=640,
height=480, framerate=30/1 ! videoconvert ! ximagesink", CAP_GSTREAMER, 0, 30,
cv::Size(640, 480), true);
28. if (!writer.isOpened())
29. {
30. printf("=ERR= can't create writer\n");
31. return -1;
32. }
33.
34. //--- GRAB AND WRITE LOOP
35. cout << "Start grabbing" << endl;
36.
37. for (;;)
38. {
39. cap.read(frame);
40. if (frame.empty())
41. {
42. cerr << "ERROR! blank frame grabbed\n";
43. break;
44. }
45. cv::resize(frame,frame,Size(640,480)); // do some image process here ...
46. writer.write(frame);
47.
48. this_thread::sleep_for(chrono::milliseconds(1000));
49. }
50. return 0;
51. }
¶ 6.2 Method 2
OpenCV provides a convenient way for developers wanting to utilize their own API, algorithm, or unique processing. Based on the examples in Method 1, another pipeline in the thread can be created to request user padding frame data to overlay clock information on the top-left of the frame via the GStreamer clock overlay element.
pipeline thread
thread pipethread(establish_appsrc_appsink_pipeline); The establish_appsrc_appsink_pipeline function builds the pipeline: appsrc ! clockoverlay ! videoconvert ! appsink, shown in the code fragment below.
establish_appsrc_appsink_pipeline
1. static void establish_appsrc_appsink_pipeline()
2. {
3. /* init GStreamer */
4. gst_init (NULL, NULL);
5. loop = g_main_loop_new (NULL, FALSE);
6.
7. /* setup pipeline */
8. pipeline = gst_pipeline_new ("pipeline");
9. appsrc = gst_element_factory_make ("appsrc", "source");
10. clockoverlay = gst_element_factory_make("clockoverlay", "clockoverlay");
11. conv = gst_element_factory_make ("videoconvert", "conv");
12. appsink = gst_element_factory_make ("appsink", "appsink");
13.
14. /* setup */
15. g_object_set(G_OBJECT (appsrc),
16. "caps",
17. gst_caps_new_simple("video/x-raw", "format", G_TYPE_STRING, "BGR",
18. "width", G_TYPE_INT, 640, "height", G_TYPE_INT,
19. 480, "framerate", GST_TYPE_FRACTION,30,1,NULL),
20. NULL);
21. gst_bin_add_many (GST_BIN (pipeline), appsrc, clockoverlay, conv, appsink, NULL);
22. gst_element_link_many (appsrc, clockoverlay, conv, appsink, NULL);
23.
24. /* setup appsrc */
25. g_object_set (G_OBJECT (appsrc), "stream-type", 0,
26. "format", GST_FORMAT_TIME, NULL);
27. g_signal_connect (G_OBJECT (appsrc), "need-data",
28. G_CALLBACK (cb_need_data), NULL);
29.
30. /* setup appsink */
31. g_object_set (G_OBJECT(appsink), "emit-signals", TRUE, NULL);
32. g_signal_connect (appsink, "new-sample", G_CALLBACK (new_sample), NULL);
33.
34. /* play */
35. gst_element_set_state (pipeline, GST_STATE_PLAYING);
36. g_main_loop_run (loop);
37.
38. free_appsrc_appsink_pipeline();
39.}
Refer to the GStreamer tutorials for more information on how to build the pipeline. Here the appsrc and appsink signal properties connect through the GObject API in line 27 and 32.
Lines 25 and 26 set the stream-type property to push mode. Line 27, hooks the cb_need_data callback function to need-data to wait for the appsrc notification to feed the data and then push it to appsrc.
cb_need_data
1. static void cb_need_data(GstElement *appsrc, guint unused_size, gpointer user_data)
2. {
3. // ......
4. // code omit
5.
6. memcpy((guchar *)map.data, grabframe.data, gst_buffer_get_size(buffer));
7.
8. // ......
9. // code omit
10. g_signal_emit_by_name (appsrc, "push-buffer", buffer, &ret);
11. }
Once the function is called back, the data for appsrc's buffer can be padded and then the signal called to push the data to appsrc.
Similarly, line 31 in establish_appsrc_appsink_pipeline sets the appsink property emit-signals to ejection mode. Line 32, hooks the new_sample callback function to wait for the notification to access the output frame data sample.
new_sample
1. static GstFlowReturn new_sample(GstElement *sink, gpointer *udata)
2. {
3. GstSample *sample;
4.
5. g_signal_emit_by_name (sink, "pull-sample", &sample);
6. if (sample)
7. {
8. // ......
9. // code omit
10. memcpy(processedframe.data, (guchar *)map.data, gst_buffer_get_size(buffer));
11.
12. gst_sample_unref (sample);
13. return GST_FLOW_OK;
14. }
15. return GST_FLOW_ERROR;
16. }
As long as appsink indicates the sample is ready and accessible, the data can be gotten from appsink's buffer.
Relative to Method 1, Method 2 is provided for those who required leverage to GStreamer's elements, like clock overlay, to process the frame data and then return to the application.
Both Method 1 and Method 2 have introduced effective ways to integrate custom applications with GStreamer. For more information on the usage of appsrc and appsink, refer to the GStreamer tutorials.
Safety Instructions
Read and follow all instructions marked on the product and in the documentation before you operate your system. Retain all safety and operating instructions for future use.
- Please read these safety instructions carefully.
- Please keep this User‘s Manual for later reference.
- Read the specifications section of this manual for detailed information on the operating environment of this equipment.
- When installing/mounting or uninstalling/removing equipment, turn off the power and unplug any power cords/cables.
- To avoid electrical shock and/or damage to equipment:
- Keep equipment away from water or liquid sources.
- Keep equipment away from high heat or high humidity.
- Keep equipment properly ventilated (do not block or cover ventilation openings).
- Make sure to use recommended voltage and power source settings.
- Always install and operate equipment near an easily accessible electrical socket-outlet.
- Secure the power cord (do not place any object on/over the power cord).
- Only install/attach and operate equipment on stable surfaces and/or recommended mountings.
- If the equipment will not be used for long periods of time, turn off and unplug the equipment from its power source.
- Never attempt to fix the equipment. Equipment should only be serviced by qualified personnel.
Getting Service
Ask an Expert: http://askanexpert.adlinktech.com
ADLINK Technology, Inc.
Address:9F, No.166 Jian Yi Road, Zhonghe District
New Taipei City 235, Taiwan
Tel: +886-2-8226-5877
Fax: +886-2-8226-5717
Email: service@adlinktech.com
Ampro ADLINK Technology, Inc.
Address:5215 Hellyer Avenue, #110, San Jose, CA 95138, USA
Tel: +1-408-360-0200
Toll Free:+1-800-966-5200 (USA only)
Fax: +1-408-360-0222
Email: info@adlinktech.com
ADLINK Technology (China) Co., Ltd.
Address:300 Fang Chun Rd., Zhangjiang Hi-Tech Park, Pudong New Area
Shanghai, 201203 China
Tel: +86-21-5132-8988
Fax: +86-21-5132-3588
Email: market@adlinktech.com
ADLINK Technology GmbH
Hans-Thoma-Straße 11
D-68163 Mannheim, Germany
Tel: +49-621-43214-0
Fax: +49-621 43214-30
Email: germany@adlinktech.com
Please visit the Contact page at www.adlinktech.com for information on how to contact the ADLINK regional office nearest you.