Manual Rev.: 1.3
Revision Date: September xx, 2023
Part Number: 50M-00012-1030
Preface
Copyright
Copyright © 2023 ADLINK Technology, Inc. This document contains proprietary information protected by copyright. All rights are reserved. No part of this manual may be reproduced by any mechanical, electronic, or other means in any form without prior written permission of the manufacturer.
Disclaimer
The information in this document is subject to change without prior notice in order to improve reliability, design, and function and does not represent a commitment on the part of the manufacturer. In no event will the manufacturer be liable for direct, indirect, special, incidental, or consequential damages arising out of the use or inability to use the product or documentation, even if advised of the possibility of such damages.
Trademarks
Product names mentioned herein are used for identification purposes only and may be trademarks and/or registered trademarks of their respective companies.
Revision History
| Revision | Description | Date |
|---|---|---|
| 1.0 | Initial release | 2021-04-12 |
| 1.1 | Release for EVA SDK R3.5 | 2021-07-30 |
| 1.2 | Release for EVA SDK R3.8 Support ROS Foxy Fitzroy. Upgrade GStreamer to 1.20.1 |
2022-07-26 |
| 1.3 | Release for EVA SDK R4.0 Support Euresys Open eVision and GigE Vision Camera. Remove Intel MSDK GStreamer Plugin. |
2023-09 |
¶ 1 Introduction
This chapter describes the installation of the following software.
- NVIDA® CUDA, NVIDIA® cuDNN, and NIVIDA® TensorRT
- Intel® OpenVINO, Intel® Media SDK
- Pylon Software
- GStreamer
- ADLINK EVA SDK
The following table lists the recommended software versions.
| Item | Version |
|---|---|
| Operating System | Windows 10 64-bit |
| GStreamer | 1.20.1 |
| NVIDIA® CUDA1 | 11.7 |
| NVIDIA CUDA® Deep Neural Network Library (cuDNN)1 | 8.8.0 |
| NVIDIA® TensorRT™1 | 8.4.1.5 |
| Intel® OpenVINO™ | 2022.3.0 |
| OpenCV2 | 4.5.0 |
| Python | 3.8.10 64-bit |
| Visual C++ Redistributable for Visual Studio | 2015-2022 |
| Pylon | 6.1.1 |
| Hikrobot MVS | 4.1.0 |
| FLIR Spinnaker SDK | 2.5.0 |
| Euresys Open eVision Libraries | 22.12.2.15123 |
| Euresys Open eVision cuda redist | 22.12.2.15123 |
| Euresys eGrabber & Memento | 23.02.0.68 |
Notes
1 If the NVIDIA solution is used for inference, NVIDIA® CUDA®, NVIDIA® cuDNN and NVIDIA® TensorRT™ must be installed.
2 OpenCV is required by the ADLINK EVA SDK. It is included in EVA SDK package.
The following table lists the estimated installation space required when installing the software under Windows 10 64-bit.
| Software | Required Storage | Install File Size |
|---|---|---|
| Visual C++ Redistributable 2015-2022 | 22 MB | exe file: 14 MB |
| Python | 100 MB | exe file: 27 MB |
| NVIDIA Driver | 1.1 GB | exe file: 400 MB |
| NVIDIA® CUDA | 5.8 GB | exe file: 2.7 GB |
| NVIDIA® cuDNN | 1000 MB | zip file: 480 MB |
| NVIDIA® TensorRT™ | 1.25 GB | exe file: 650 MB |
| Intel® OpenVINO™ | 1 GB | exe file: 200 MB |
| Pylon | 840 MB | exe file: 415 MB |
| Hikrobot MVS | 368 MB | exe file:141 MB |
| FLIR Spinnaker SDK | 1.9 GB | exe file: 530 MB |
| ADLINK EVA SDK | 1.65 MB | zip file: 660 KB |
| GStreamer | 700 MB | zip file: 165 MB |
| Euresys Open eVision Library | 1.5 GB | exe file: 549 MB |
| Euresys Open eVision cuda redist | 1.5 GB | msi file: 973 MB |
| Euresys eGrabber | 1.1 GB | exe file: 292 MB |
| Euresys Memento | 200 MB | exe file: 10.4 MB |
For more details about ADLINK EVA, refer to https://eva-support.adlinktech.com.
¶ 2 Uninstall Previous Software
If the system has a previous version of the software installed, it must first be uninstalled before the new version can be installed. The following content is for reference only (except for the software developed by ADLINK). Actual uninstall procedures vary depending on the vendor software.
¶ 2.1 Uninstall via Software Installer Program
Run the program’s installer and follow the screen prompts to uninstall the software. The following table lists the software installers with an uninstall feature, and a sample of the uninstall window.
| Software | Uninstall Window |
|---|---|
| Python |
 |
| EVA SDK |
 |
| Intel® OpenVINO™ |
OpenVINO 2021.3 or earlier version removal:  OpenVINO 2021.4 or later version removal: Refer to https://docs.openvino.ai/latest/openvino_docs_install_guides_uninstalling_openvino.html |
| Intel® Media SDK |
 |
| pylon |
 |
| Hikrobot MVS |
 |
| FLIR Spinnaker SDK |
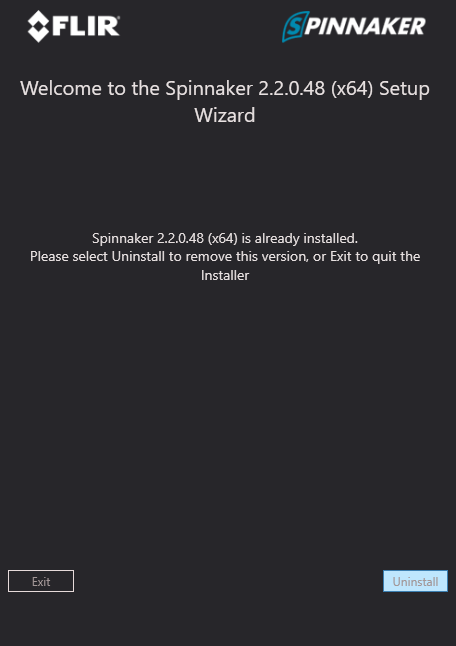 |
¶ 2.2 Uninstall via Programs and Features
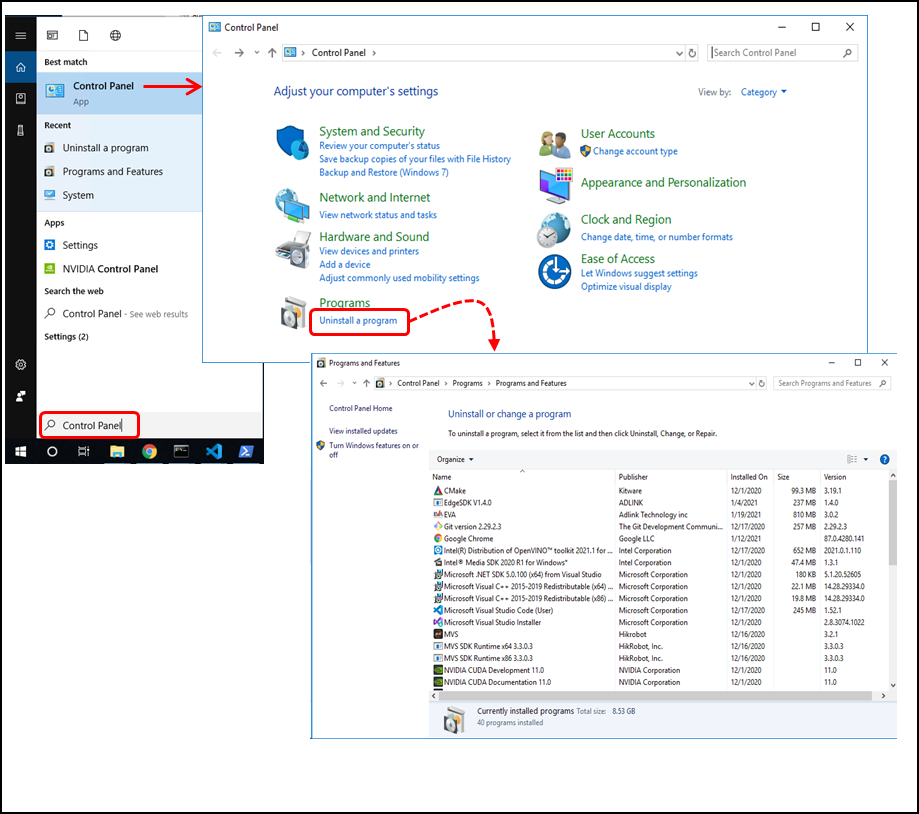
- Press <Windows> + <Q> and type Control Panel, and then click Control Panel. Click Uninstall a program to open Programs and Features.
- Double-click the program to be uninstalled. Click Yes to begin uninstalling the program.
The following table lists the software that can be uninstalled through Windows Programs and Features.
| Python | Python *** |
| NVIDIA Driver | NVIDIA Graphic Driver *** |
| NVIDIA® CUDA | NVIDIA CUDA *** |
| Intel® OpenVINO™ | Intel® Distribution of OpenVINO™ toolkit *** for Windows |
| Intel® Media SDK | Intel® Media SDK *** for Windows |
| Pylon | pylon *** Camera Software Suite |
| Hikrobot MVS | MVS |
| FLIR Spinnaker SDK | Spinnaker SDK |
| Euresys Open eVision Libraries | Open eVision *** |
| Euresys Open eVision cuda redist | Open eVision *** NVIDIA CUDA Redistributables |
| Euresys eGrabber | Euresys eGrabber *** |
| Euresys Memento | Euresys Memento *** |
| Other software installed with Euresys software |
CodeMeter Runtime Kit Reduced *** Euresys Neo License Manager *** |
| ADLINK EVA SDK | EVA |
| GStreamer | EVA |
Note: *** refers to the software version or other information listed in Programs and Features.
¶ 2.3 Manually Remove Files
Some software does not support being completely uninstalled with an uninstaller. These must be uninstalled manually be deleting the files from the system.
| Software | Files to Delete |
| NVIDIA® cuDNN |
After uninstalling NVIDIA® CUDA, remove the following files:
|
| NVIDIA® TensorRT™ | Delete all NTensorRT folders and files from the location they were placed in during installation. |
¶ 2.4 Remove Environment Settings
When installing NVIDIA TensorRT, the binary and library are added to the environment PATH. When uninstalling TensorRT, the environment PATH must be deleted manually.
Please use the following steps to delete TensorRT’s path setting.
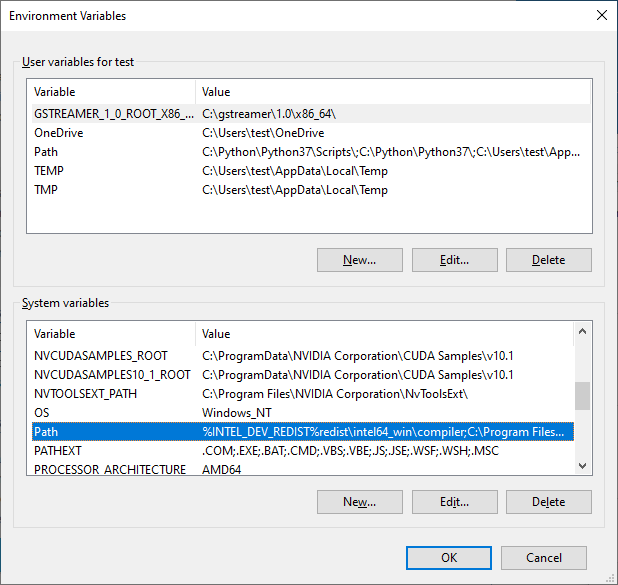
- In the Windows Search box, type edit the system environment variables and press <Enter>.
- Click Environment Variables
- Under System variables, click Path and then Edit.
- Select TensorRT’s bin and lib path and click Delete.

¶ 3 Installing Required Dependencies
This chapter describes how to install the following software:
- Microsoft Visual C++ Redistributable for Visual Studio 2015-2022
- Python 3.8 64-bit
If the system already has Python and CMake installed, make sure they are the correct version.
¶ 3.1 Installing Microsoft Visual C++ Redistributable for Visual Studio
Download the install file for Microsoft Visual C++ Redistributable for Visual Studio 2015, 2017, 2019 and 2022 x64 version from https://learn.microsoft.com/en-US/cpp/windows/latest-supported-vc-redist?view=msvc-170.
After downloading, run the installer to install the software.
¶ 3.2 Installing Python
Download the Python 3.8.10 64-bit for Windows from https://www.python.org/downloads/release/python-3810/.
Uninstall all previous versions of Python from the system. For more details, refer to Uninstall Previous Software.
After downloading, run the installer, select Add Python 3.8 to PATH to add the application to the environment PATH, and then click Install Now.
The default path is C:\Users\<USER_ID>\AppData\Local\Programs\Python\Python38.
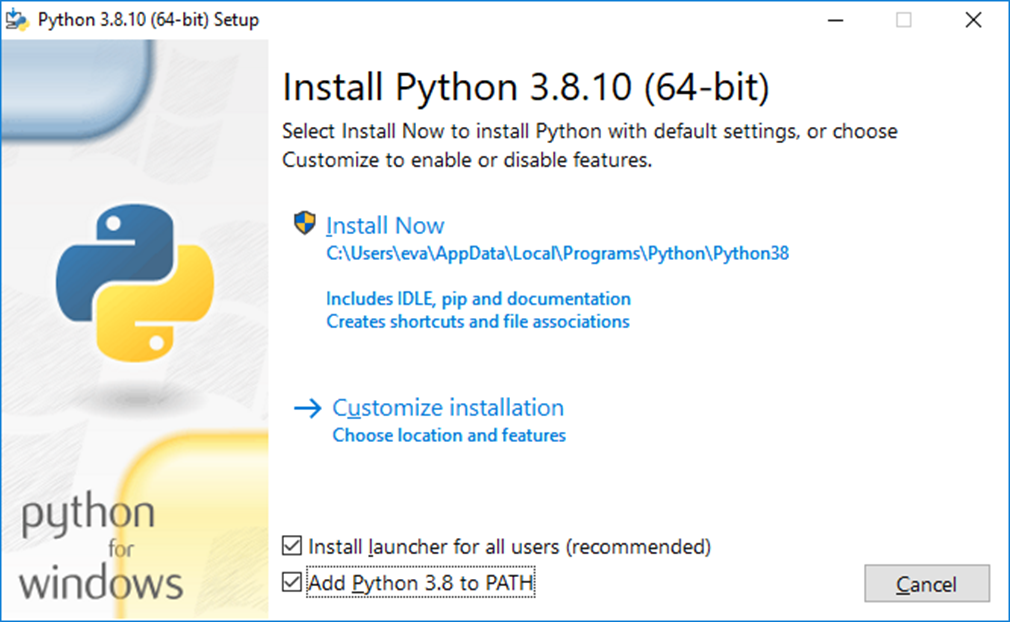
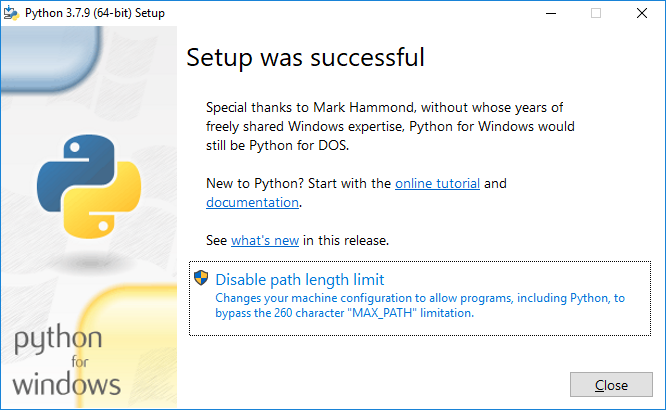
Click Disable path length limit to allow the Python default path.
After installation, open a command prompt and enter the following command to verify the environment PATH.
| > python --version |
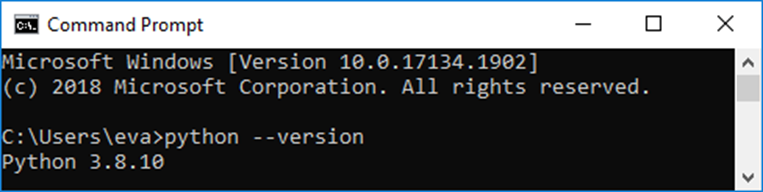
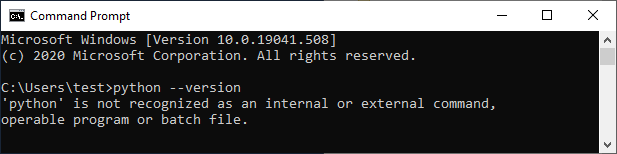
If the terminal cannot find the python command, the system might not be able to find the program. For the instructions to add Python to the system environment variables, see Set Windows Environment Variables.
Run the following command to install additional required packages.
| > pip3 install numpy boto3 opencv-python>4.5.2 onnx==1.10.0 pika==1.3.1 |
¶ 3.3 Set Windows Environment Variables
This section describes how to manually set the Windows environment.
Use the following steps to update the Windows PATH if an execute command returns an error message stating that an application cannot be found.
- In the Windows Search box, type edit the system environment variables and press <Enter>.
- Click Environment Variables.
- Under System variables, click Path and then Edit.
- Click New and enter the program binary directory or click Browse and choose the directory.
For example,- The Python default path is C:\Users\<USER_ID>\AppData\Local\Programs\Python\Python38.
- The Python script tool (such as pip3) default path is C:\Users\<USER_ID>\AppData\Local\Programs\Python\Python38\Scripts.
- The Pylon runtime library default path is C:\Program Files\Basler\pylon 6\Runtime\x64.
- Click OK repeatedly to close each window.
¶ 4 Installation Process for Intel Solution
If you are not using the Intel® OpenVINO™, this chapter can be skipped.
¶ 4.1 Uninstall Previous Version
Uninstall all previous versions of OpenVINO and/or Media SDK from the system. For more details, refer to Uninstall Previous Software.
¶ 4.2 Installing the OpenVINO Toolkit
EVA SDK only need the OpenVINO runtime, the section will describe how to download and use archive files to install OpenVINO Runtime.
For more details, refer to https://docs.openvino.ai/2022.3/openvino_docs_install_guides_overview.html
¶ 4.2.1 Download and Install the OpenVINO Core Components
Open a command prompt as administrator, enter the following commands.
| > mkdir "C:\Program Files (x86)\Intel" > cd %USERPROFILE%/Downloads > curl -L https://storage.openvinotoolkit.org/repositories/openvino/packages/2022.3/windows/w_openvino_toolkit_windows_2022.3.0.9052.9752fafe8eb_x86_64.zip --output openvino_2022.3.0.zip > tar -xf openvino_2022.3.0.zip > ren w_openvino_toolkit_windows_2022.3.0.9052.9752fafe8eb_x86_64 openvino_2022.3.0 > move openvino_2022.3.0 "C:\Program Files (x86)\Intel" |
For more details of the installation, refer to https://docs.openvino.ai/2022.3/openvino_docs_install_guides_installing_openvino_from_archive_windows.html
¶ 4.2.2 Set the Environment Variables
Before compiling and running OpenVINO applications, the environment variables must be updated.
Open a command prompt and run the setupvars.bat file to temporarily set the environment variables.
| > "c:\Program Files (x86)\Intel\openvino_2022.3.0\setupvars.bat" |
Notes:
- The OpenVINO environment variables are removed when the command prompt window is closed.
¶ 4.2.3 Optional Steps for Intel® Processor Graphics (GPU)
The steps in this section are required only if you want to use processor graphics (GPU) on your system.
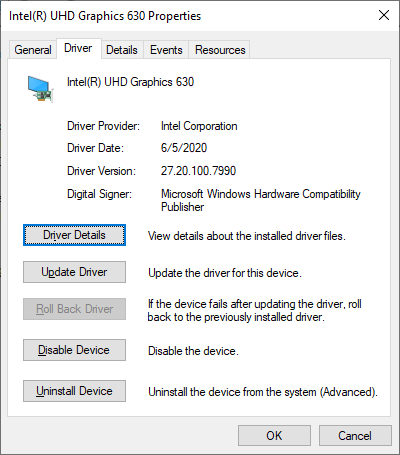
If your applications offload computation to Intel® Integrated Graphics, the Intel Graphics Driver for Windows version must be 15.65 or higher. To see if you have this driver installed:
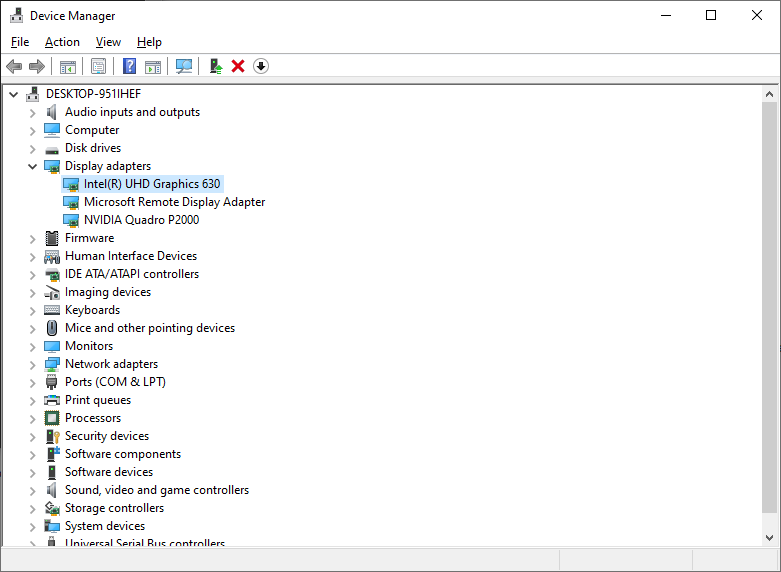
- Type device manager in your Windows Search box. The Device Manager opens.
- Click the drop-down arrow to view the display adapters. See the installed adapter.
- Right-click the adapter name and select Properties.
- Click the driver tab to see the driver version. Make sure the version number is 15.65 or higher.
- If your device driver version is lower than 15.65, download and install a higher version from https://downloadcenter.intel.com/product/80939/Graphics-Drivers.
For more information, refer to https://docs.openvino.ai/2022.3/openvino_docs_install_guides_configurations_for_intel_gpu.html#gpu-guide-windows
¶ 5 Installation Process for NVIDIA Solution (Optional)
If you are not using an NVIDIA inference solution, this chapter can be skipped.
¶ 5.1 Uninstall Previous Version
Uninstall all previous versions of CUDA Toolkit from the system and remove cuDNN and/or TensorRT files. For more details, refer to Uninstall Previous Software.
¶ 5.2 Installing NVIDIA Driver
According the NVIDIA product type, download the corresponding driver installer from the NVDIA Driver download website https://www.nvidia.com/download/index.aspx?lang=en-us.
For example, for NVIDIA Quadro P2000, the search items are as follows,
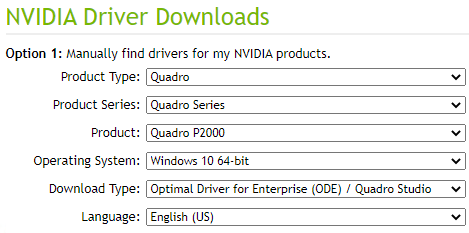
After searching for the appropriate product, follow the step on the website to download the driver.
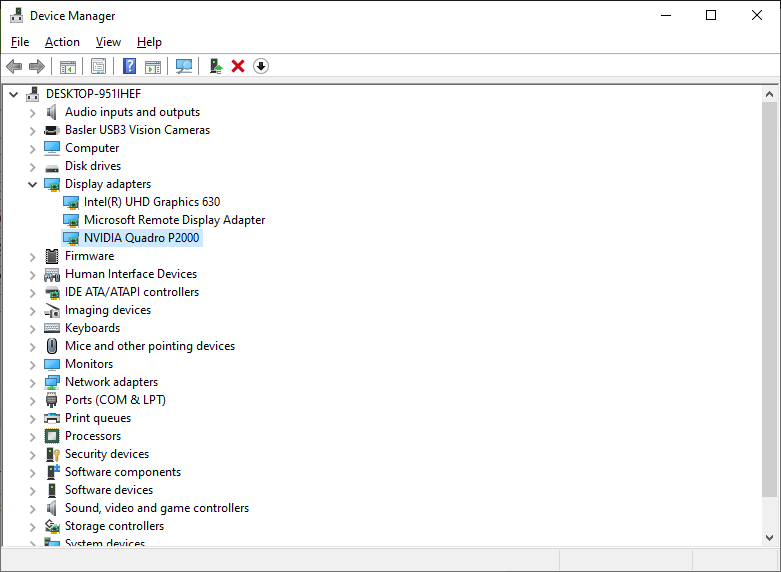
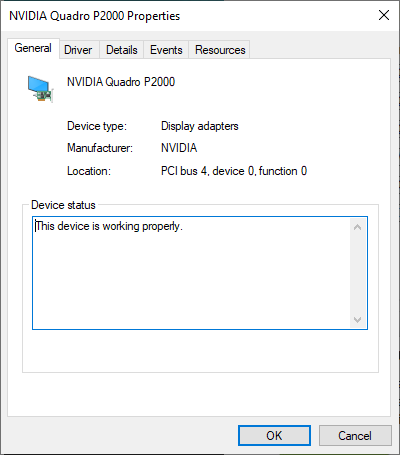
After downloading, run the driver installer and follow the screen prompts to install the driver. It is recommended to reboot after installation to ensure the normal operation of the driver. After rebooting, open Device Manager, click Display adapters, and check that the NVIDIA device is working properly.
¶ 5.3 Installing CUDA Toolkit
Download the NVIDIA® CUDA toolkit 11.0 from https://developer.nvidia.com/cuda-11-7-0-download-archive?target_os=Windows&target_arch=x86_64&target_version=10&target_type=exe_local.
After downloading, run the installer and follow the screen prompts to install the software.
¶ 5.4 Installing cuDNN
Download cuDNN v8.8.0 from https://developer.nvidia.com/downloads/c118-cudnn-windows-8664-880121cuda11-archivezip
Log in or join the NVIDIA Developer Program as a member.
After downloading, unzip the cuDNN package and copy the following files into the following CUDA Toolkit folders:
- Copy bin\*.dll to C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v11.7\bin
- Copy include\*.h to C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v11.7\include
- Copy lib\x64\*.lib to C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v11.7\lib\x64
Download Zlib from http://www.winimage.com/zLibDll/zlib123dllx64.zip.
Uzip and copy zlibwapi.dll to C:\Windows\System32.
Note: Zlib is a data compression software library that is needed by cuDNN.
Refer to the NVIDIA cuDNN documentation for more information: https://docs.nvidia.com/deeplearning/cudnn/install-guide/index.html#install-windows.
¶ 5.5 Installing TensorRT
Download and install TensorRT 5.4.1.5 for Windows from https://developer.nvidia.com/compute/machine-learning/tensorrt/secure/8.4.1/zip/TensorRT-8.4.1.5.Windows10.x86_64.cuda-11.6.cudnn8.4.zip.
Log in or join the NVIDIA Developer Program as a member.
After downloading, unzip and copy the TensorRT-8.4.1.5 folder to C:\Program Files\NVIDIA GPU Computing Toolkit.
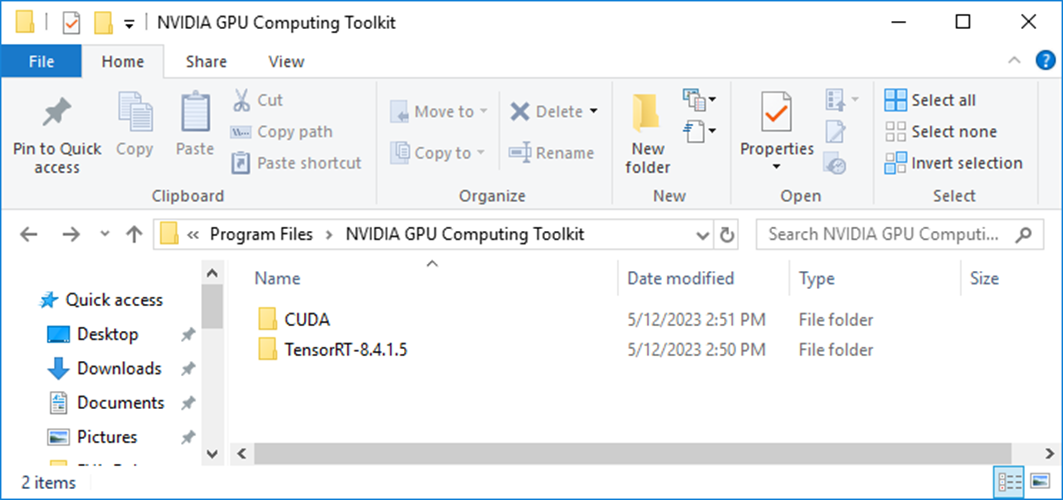
Add the following variables to the PATH environment variable.
- C:\Program Files\NVIDIA GPU Computing Toolkit\TensorRT-8.4.1.5\lib
- C:\Program Files\NVIDIA GPU Computing Toolkit\TensorRT-8.4.1.5\bin
For the instructions to add the system environment, refer to Set Windows Environment Variables.
¶ 5.6 Installing ONNX Runtime
After installing the CUDA Toolkit, run the following commands to install the ONNX Runtime packages.
|
> pip3 install pillow > pip3 install onnxruntime-gpu==1.12.1 |
Refer to https://www.onnxruntime.ai/
¶ 6 Installing Pylon Software (Optional)
If you are not using a Basler camera, this chapter can be skipped.
¶ 6.1 Uninstall Previous Versions
Uninstall all previous versions of pylon or items where the publisher is Basler from the system. For more details, refer to Uninstall Previous Software.
¶ 6.2 Install pylon Software
If Basler cameras are used for the system, pylon software must be installed.
Download the pylon camera software from the Basler website at: https://www.baslerweb.com/en/sales-support/downloads/software-downloads/.
The recommended software versions are:
- Software Category: pylon Software
- Version: 6.1.1
- Operating System: Windows 64-bit
Alternately, use the link: https://www.baslerweb.com/en/sales-support/downloads/software-downloads/#type=pylonsoftware;language=all;version=6.1.1;os=windows64bit
Choose Camera Software Suite Windows.
After downloading, run the camera software suite installer.
Follow the screen prompts to install the software.
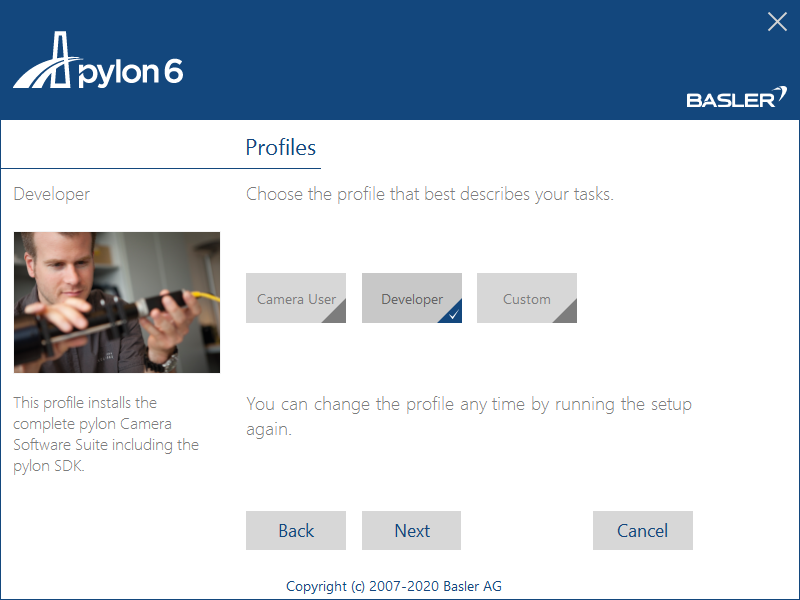
On the Profiles page, choose Developer.
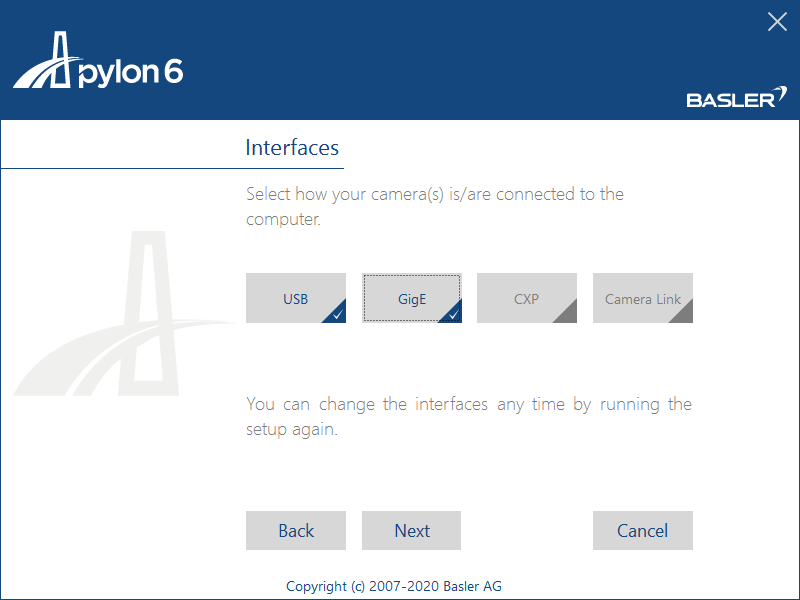
On the Interfaces page, select the interfaces to which the camera(s) is/are connected.
Verify the Basler's USB3/GigE Vision cameras with pylon:
- After installing pylon, run the pylon Viewer tool to test the camera.
- Refer to the following Basler document on using the pylon Viewer:
https://docs.baslerweb.com/overview-of-the-pylon-viewer.html
¶ 7 Installing Hikrobot Software (Optional)
If you are not using a Hikrobot camera, this chapter can be skipped.
¶ 7.1 Uninstall Previous Versions
Uninstall all previous versions of MVS from the system. For more details, refer to Uninstall Previous Software.
¶ 7.2 Install Hikrobot MVS Software
If Hikrobot Cameras are used, the Hikrobot MVS Software must be installed.
Download the Hikrobot installer from the website at: https://www.hikrobotics.com/en/machinevision/service/download?module=0
The recommended software versions are:
- Version: Machine Vision Software MVS V4.1.0(Windows)
- Operating System: Windows 64-bit
Launch the downloaded installer and install the MVS software.
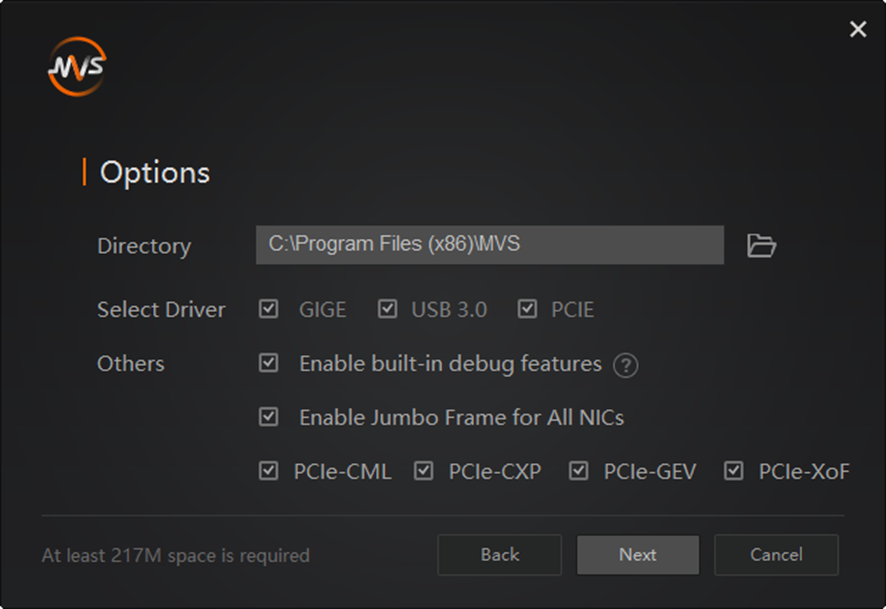
Verify the Hikrobot's USB3/GigE Vision cameras with MVS.
- After installing MVS, run the MVS tool to test the camera.
- The file should be located at C:\Program Files (x86)\MVS\Applications\Win64\MVS.exe"
- Refer to the MVS document at C:\Program Files (x86)\MVS\Applications\Win64\doc
¶ 8 Installing FLIR Software (Optional)
If you are not using a FLIR camera, this chapter can be skipped.
¶ 8.1 Uninstall Previous Versions
Uninstall all previous versions of Spinnaker SDK from the system. For more details, refer to Uninstall Previous Software.
¶ 8.2 Install FLIR Spinnaker Software
If FLIR cameras are used, the FLIR Spinnaker Software Suite for Windows must be installed.
Download FLIR Spinnaker installer from https://www.flir.asia/products/spinnaker-sdk/
The recommended software versions are:
- Version: SpinnakerSDK_FULL_2.5.0.80_x64 (Windows)
- Operating System: Windows 64 bit
Launch the download installer. In the Profiles page, choose Application Development.
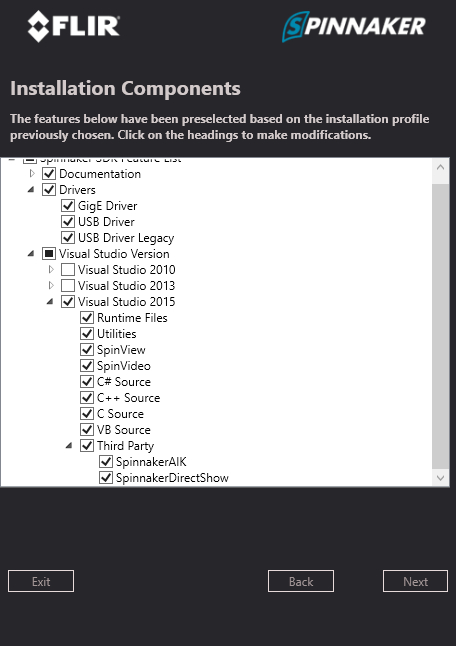
Select all camera drivers and Visual Studio versions. These include the runtime library based on the Visual Studio code.
Enable the GigE Cameras.
Verify the FLIRs USB3/GigE Vision cameras with SpinView:
- After installing Spinnaker, run the SpinView tool to test the camera.
- The file should be located at “C:\Program Files\FLIR Systems\Spinnaker\bin64\vs2015\ SpinView_WPF.exe”.
¶ 9 Installing Process for Euresys Solution (Optional)
This chapter covers the installation of the required software for using Euresys Open eVision and GigE Vision Cameras.
If you are not using Euresys solution, this chapter can be skipped.
If you would like to use Euresys, contact your regional distributor to get the Euresys licenses. https://www.euresys.com/en/Products/Accessory/Neo-USB-Dongle-(empty)
¶ 9.1 Uninstall Previous Version
Uninstall all previous versions of Euresys Open eVision and/or GigE Vision Cameras. For more details, refer to Uninstall Previous Software.
¶ 9.2 Installing GigE Vision Camera Software
If Gige vision cameras are used, the Memento and eGrabber software must be installed.
The recommended software versions are:
- Version: 23.02.0.70
- Operating System: Windows, 64 bit
Download Memento and eGrabber from https://www.euresys.com/en/Support/Software,-drivers-and-documentation?packages=20d16334-0c64-45e0-8ba0-0d099597937f%3a23.02%3be55e4c47-ed00-45cf-bc7e-ebd6fb2e4c23%3a23.02&series=105d06c5-6ad9-42ff-b7ce-622585ce607f&os=Windows
Install Memento and Euresys eGrabber.
Select Gigelink as the following figure when installing Euresys eGrabber.
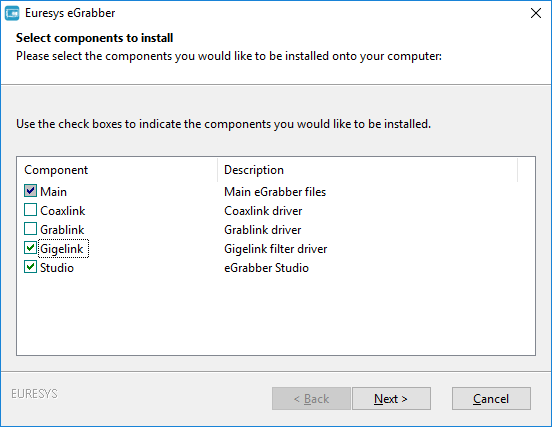
After installation, connect the camera and run the Euresys Studio to verify.
¶ 9.3 Installing Euresys Open eVision
If Euresys Open eVision is used, the Open eVision, the Neo License Manager, Codemeter, and the Open eVision Cuda resdist must be installed.
The recommended software versions are:
- Version: 22.12.2.15123
- Operating System: Windows 10, 64-bit
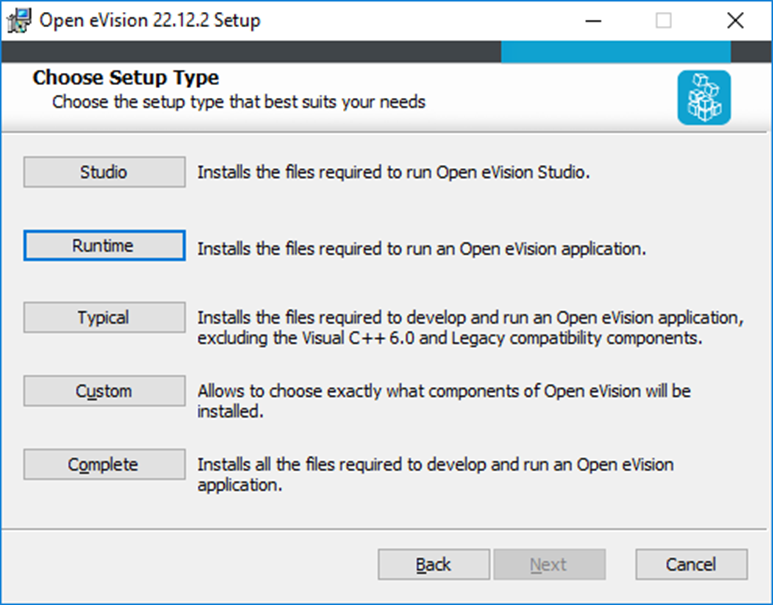
Download and install open_evision-win-22.12.2.15123.exe and open_evision-win-cuda-redist-22.12.2.15123.msi from https://www.euresys.com/en/Support/Download-area?series=f97da39d-3c25-404c-aee7-73de1d1867fc&os=Windows&packages=5e326cc7-278b-41b3-b48b-86a69cca5540:22.12;
Select Runtime or Complete to install Open eVision and Open eVision with cuda.
After installing Open eVision with cude, copy cublas64_11.dll from C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v11.7\bin and replace C:\Program Files (x86)\Euresys\Open eVision 22.12\Resources\CUDA\cublas64_11.dll.
¶ 10 Installing GStreamer and ADLINK EVA SDK on Windows
¶ 10.1 Uninstall Previous Version
Uninstall all previous versions of EVA from the system. For more details, refer to Uninstall Previous Software.
¶ 10.2 Install GStreamer and EVA SDK
Download the EVA install package and copy it to the Windows 64-bit system. Follow the installation screen prompts.
The installer includes GStreamer and the ADLINK EVA SDK files. After installation, the GStreamer files will be located at C:\ADLINK\gstreamer and the EVA SDK will be located at C:\ADLINK\eva.
The ADLINK EVA SDK must use a python plugin and third-party plugins for GStreamer. ADLINK has created a GStreamer installer to simplify the installation process. If there is any problem with the plugin provided by GStreamer, ask for help from the plugins’ developers. ADLINK cannot guarantee the performance and stability of any third-party plugins.
Note: Due to the limitation of the mason build tool, the ADLINK EVA SDK currently only supports drive C:\ as the installation and build location.
¶ 10.3 Set Environment Variables
Open a command prompt and run setupvars.bat to temporarily set the environment variables.
|
> C:\ADLINK\gstreamer\setupvars.bat > C:\ADLINK\eva\scripts\setup_eva_envs.bat |
Check the GStreamer Installation.
| > gst-launch-1.0 videotestsrc ! videoconvert ! autovideosink |
After executing the command, a window with an animated video pattern should display on-screen.
Use <CTRL> + <C> in the terminal to stop the program.
Note: The environment variables are removed when closing the command prompt or terminal.
¶ Safety Instructions
Read and follow all instructions marked on the product and in the documentation before you operate your system. Retain all safety and operating instructions for future use.
- Please read these safety instructions carefully.
- Please keep this User‘s Manual for later reference.
- Read the specifications section of this manual for detailed information on the operating environment of this equipment.
- When installing/mounting or uninstalling/removing equipment, turn off the power and unplug any power cords/cables.
- To avoid electrical shock and/or damage to equipment:
- Keep equipment away from water or liquid sources.
- Keep equipment away from high heat or high humidity.
- Keep equipment properly ventilated (do not block or cover ventilation openings).
- Make sure to use recommended voltage and power source settings.
- Always install and operate equipment near an easily accessible electrical socket-outlet.
- Secure the power cord (do not place any object on/over the power cord).
- Only install/attach and operate equipment on stable surfaces and/or recommended mountings.
- If the equipment will not be used for long periods of time, turn off and unplug the equipment from its power source.
- Never attempt to fix the equipment. Equipment should only be serviced by qualified personnel.
Please visit the Contact page at www.adlinktech.com for information on how to contact the ADLINK regional office nearest you.